Enabling governments and commercial space operators to perform space-based device maintenance, safely and remotely.
THE CHALLENGE
Modern space missions often involve sending equipment and devices into hazardous environments that are impractical for manned crews to operate in. Additionally, longer space missions make it difficult to send manned crews or machines to resolve technical difficulties in a timely manner.
THE SOLUTION
In order to help companies and governments ensure the reliable operations of space-based equipment, researchers at SRI International have developed Qbot. It’s a semi-autonomous, dual armed robot built for complex space operations. In addition to developing hardware, SRI researchers are developing AI software for single and multi-robot autonomy.
As governments and commercial entities continue to invest significant amounts of time and money into space exploration, the associated equipment is surging in complexity. Add to this the fact that most areas of space are inaccessible to human crews, and it becomes clear that maintaining space-based devices and satellites is a significant challenge.
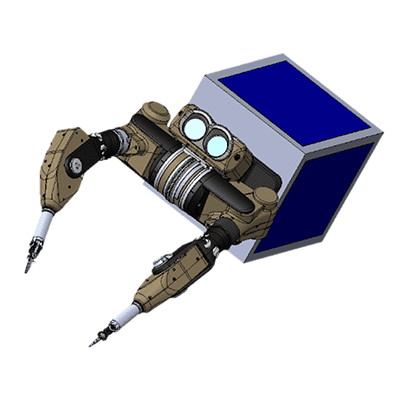
To help make space exploration more accessible, researchers at SRI developed Qbot. It is a semi-autonomous, dual armed concept for complex space operations. Built using technology from the Taurus Dexterous Robot, an SRI solution for emergency responders, Qbot contains a variety of modifications specifically for space missions.
Qbot has numerous applications such as:
- In-space equipment assembly
- Satellite inspection and repair
- Deep space exploration
- Assisting humans with performing hazardous tasks


