Provide <10 centimeter level localization accuracy, using small low-cost sensors and processors, on dismount, ground, and aerial platforms.
THE CHALLENGE
High-precision navigation and mapping is challenging, because the real world is very dynamic with lots of moving platforms and scene changes. Past solutions rely on bulky expensive sensors. Our goal is to provide highly accurate <10 cm localization and mapping over large distances/areas using low-cost consumer grade hardware in compact form factors with and without GPS.
THE SOLUTION
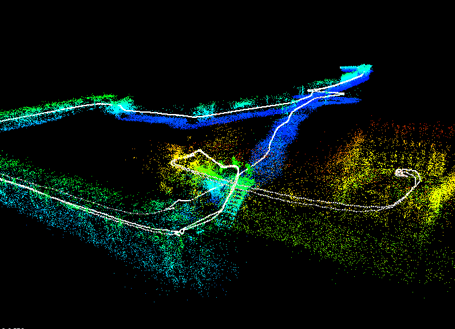
SRI developed a navigation system that uses small low-cost cameras and IMUs to dynamically create and update visual maps on the fly in an intelligent manner. Visual landmarks viewed as features across different times, angles, and distances form powerful loop-closure effects to optimize the map and to improve navigation accuracy to centimeter level using the map. Our entire system is ported to mobile smartphone processor.
High-precision navigation and mapping is important to many applications, including augmented reality systems, complex-area mapping and modeling, construction inspection, autonomous vehicles, and commercial drones. Enabling accurate autonomous navigation of dismounts, drones and ground vehicles in GPS denied or degraded environments is also a critical need for DoD (Department of Defense) applications.
Past solutions use large expensive sensors, such as LIDAR and high-end differential GPS device, for obtaining centimeter level localization, which is not practical for many applications. In addition, GPS doesn’t work without a clear view of the sky—so navigating tunnels, buildings, indoor car parks, dense urban areas and forests is ruled out.
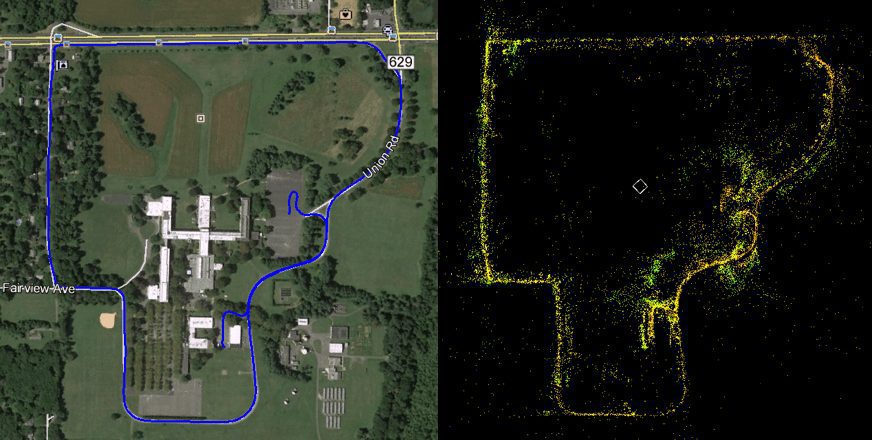
SRI provides a low-cost high-precision localization and mapping solution to these applications. We developed a system that uses small commercial cameras and IMUs to provide centi-meter level localization accuracy, both with and without GPS. Our solution dynamically creates and updates visual maps on the fly in an intelligent manner. Visual landmarks viewed as features across different times, angles, and distances form powerful loop-closure effects through our state-of-the-art visual-inertial SLAM (simultaneous localization and mapping) algorithms to optimize the map and to improve navigation accuracy to centimeter level using the map. These visual maps can also be shared and updated across different platforms. Our system has been successfully used for dismounted users, ground vehicles, and commercial drones.


